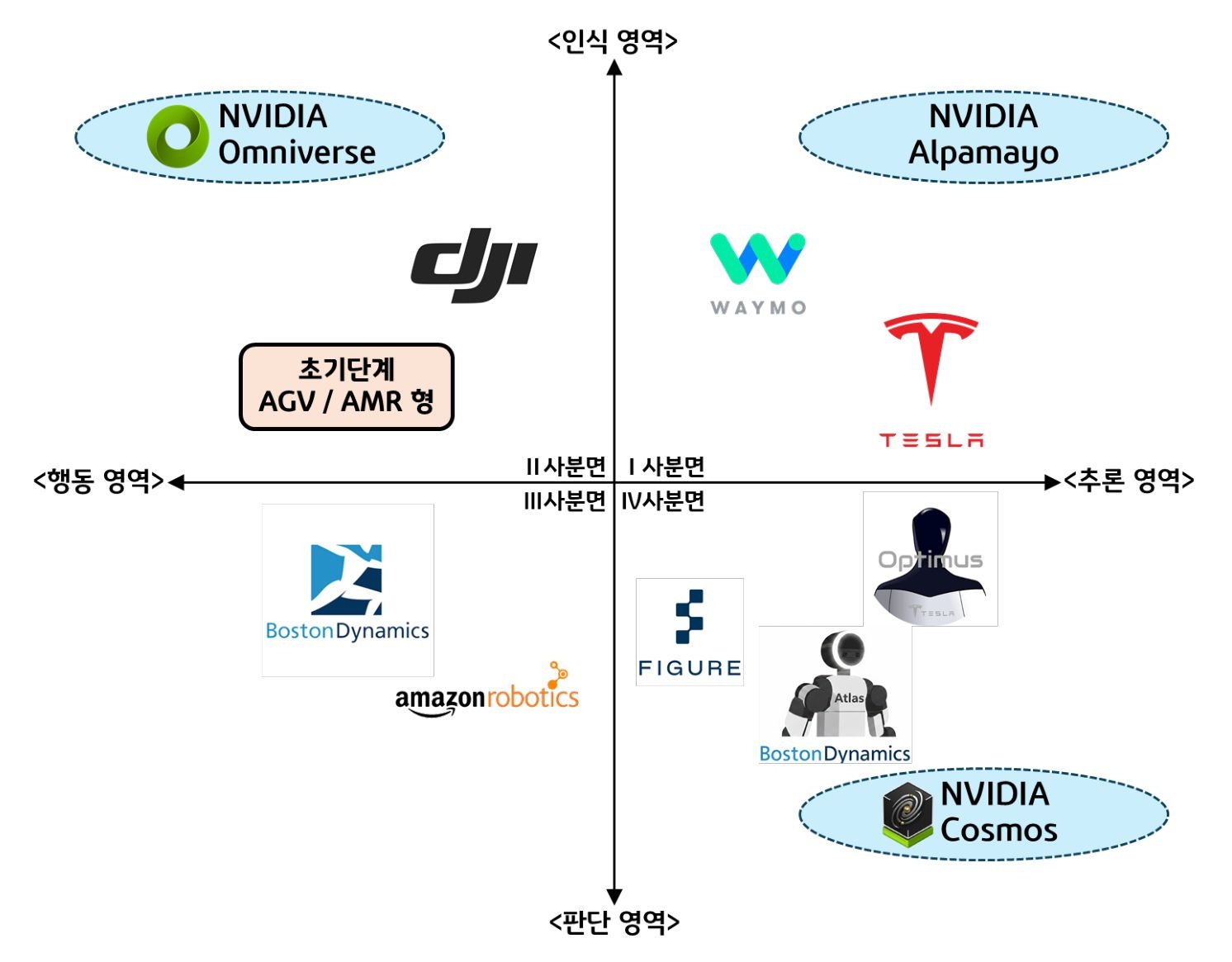
◼ 글로벌 피지컬 AI 기업들의 기술적 특성과 전략 방향을 ‘추론과 행동’(수평축), ‘인식과 판단’(수직축)으로 구성된 2차원 포지셔닝 매트릭스를 통해 분석함으로써 전략적 접근 방식을 비교·구체화
○ 이 프레임워크는 피지컬 AI를 구성하는 인식·추론·판단·행동을 일정한 순서에 따라 진행되는 프로세스가 아니라 개별 기업의 전략 방향을 나타내는 ‘지향성 지도’로 해석
○ 수평축의 추론과 행동은 AI가 ‘상황을 해석하고 판단하는 능력’과 ‘빠르고 안정적으로 움직이는 능력’ 중 어느 쪽에 더 집중하는지를 나타냄
- ‘추론’ 영역에 위치한 기업일수록 대규모 AI 모델을 통해 상황을 해석하고 판단하는 지능 고도화에 집중
- ‘행동’ 영역에 위치한 기업일수록 물리적 환경에서 빠르고 안정적으로 움직이며 반복 작업을 정확하게 수행하는 로봇 제어 능력 향상에 집중