◼ 엔비디아의 피지컬 AI 전략은 특정 로봇이나 응용 제품의 직접 개발보다 피지컬 AI 전반을 작동하는 ‘기술 인프라’ 구축에 집중
○ 휴머노이드, 자율주행차, 드론, 물류 로봇 등 개별 구현체 간 기술 경쟁에 직접 참여하기보다 이들이 공통으로 요구하는 연산·학습·시뮬레이션에 대한 인프라를 구축하여 피지컬 AI 생태계 전반의 핵심적 위치를 선점하고자 함
작게
보통
크게
○ 휴머노이드, 자율주행차, 드론, 물류 로봇 등 개별 구현체 간 기술 경쟁에 직접 참여하기보다 이들이 공통으로 요구하는 연산·학습·시뮬레이션에 대한 인프라를 구축하여 피지컬 AI 생태계 전반의 핵심적 위치를 선점하고자 함
◼ 옴니버스(Omniverse)
○ 로봇, 자율주행차, 물류 시스템, 공장 설비 등 다양한 피지컬 AI 모델을 실제 배포하기 이전 학습·검증·테스트를 위한 ‘디지털 트윈’ 및 ‘시뮬레이션’ 환경을 제공
○ 센서 데이터 생성 및 검증을 위한 환경 인식과 로봇 동작 검증을 위한 행동 실행에 이르는 가상 환경 기반의 반복 검증을 지원하여, 피지컬 AI 개발 비용 및 리스크를 대폭 절감하는 역할을 수행
◼ 코스모스(Cosmos)
○ 물리적 법칙, 환경 조건, 공간 정보, 과학 데이터를 구조화한 현실 세계 기반 월드 파운데이션 모델로, AI 모델의 현실 세계 이해 및 추론 능력을 정교화하는 역할을 담당
○ 이는 텍스트·이미지 중심의 기존 AI 학습을 넘어, 피지컬 AI가 현실 환경에서 합리적 판단을 내릴 수 있도록 사전 지식과 맥락을 제공하는 기반으로 평가됨
엔비디아 옴니버스와 코스모스의 특징

주: 엔비디아 옴니버스(왼쪽)는 로봇 팔과 조작 대상 물체가 가상 공간에 구현되어 있으며 코스모스(오른쪽)는 물체의 마찰(질감)·광원 등 물리 적 법칙이 적용되어 있음 자료: 엔비디아 홈페이지
○ 엔비디아는 CES 2026에서 자율주행차의 ‘추론 기반’ 개발을 가속화하기 위해 오픈 VLA 모델·시뮬 레이션·데이터세트로 구성된 알파마요 제품군을 공개하며 인식·추론 중심의 자율주행차형 피지컬 AI 생태계 확장 전략을 구체화
CES 2026에서 공개되는 엔비디아 알파마요
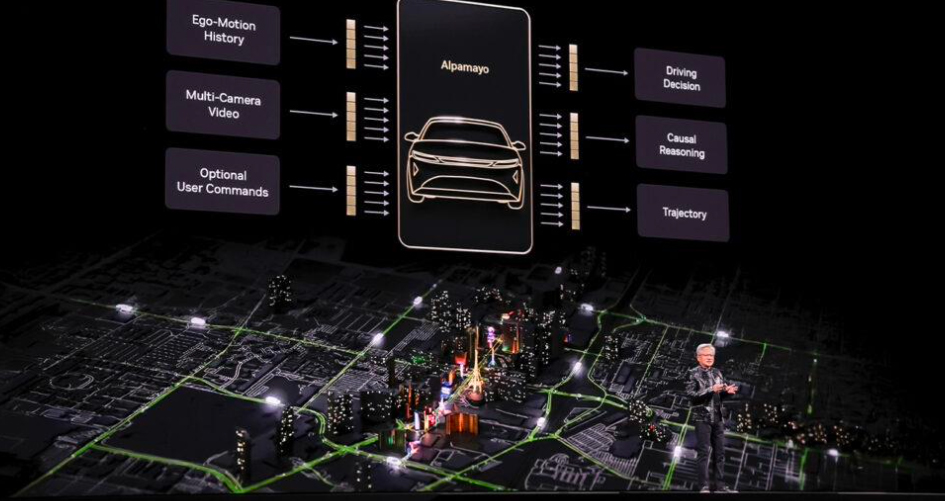
자료: 엔비디아 홈페이지
○ 오픈 소스 VLA 모델인 알파마요 1은 시각적 인식(Vision), 언어적 추론(Language), 행동적 결정(Action)을 연결하는 통합 AI 구조로, 단순 인식과 제어를 넘어 특정 행동 선택의 이유를 설명할 수 있는 추론 체계를 갖춤으로써 복잡한 실제 주행 시나리오에서도 합리적 판단이 가능
○ 오픈 소스 시뮬레이션 프레임워크인 ‘알파심(AlphaSim)’과 1,727시간의 오픈 주행 데이터(100TB 규모)도 함께 공개
○ 젠슨 황은 “학습은 데이터, 텍스트, 비디오가 아닌 3차원 시뮬레이션 환경에서 나온다. 시뮬레이
션이야말로 엔비디아가 주로 하는 일이다”라며 시뮬레이션 기반 학습 전략을 강조
○ 알파마요는 복잡한 실제 주행 환경에서도 인간에 준하는 판단 능력 구현을 목표로 2026년 1분기 미국 도로에서 메르세데스벤츠 CLA 등 실제 차량에 적용
○ 피지컬 AI 확산을 가로막는 가장 큰 제약 요인으로 ‘현실 세계 데이터 부족’과 ‘안전한 실증 환경 부재’를 지목하고, 이를 해소하는 전략을 우선적으로 추진 중임
○ 이러한 전략적 방향성은 엔비디아가 개별 로봇이나 제품을 직접 개발하기보다 피지컬 AI가 학습되고 검증되며 현실에 적용되는 전 과정을 포괄하는 인프라를 선점함으로써, 다양한 피지컬 AI 기업과 산업을 연결하는 생태계의 핵심 플랫폼 사업자로 자리매김하고자 하는 의도를 보여줌
○ 이는 피지컬 AI 생태계 전반의 기술적 성숙도를 높이는 동시에, 고성능 연산 인프라에 대한 수요를 자연스럽게 확대하는 효과를 가져올 것으로 예상
※ 본 보고서는 연구자의 개인 의견으로 KB경영연구소 공식 의견과 다를 수 있으며, 인용시 출처를 밝혀주시기 바랍니다.제약 요인으로 작용할 수 있음
금융용어사전
금융용어사전



